第1题
服务型智能扫地机器人因其低廉的价格和高效的工作能力,越来越受到消费者的认可,目前己逐渐进入家庭生活代替人们的清洁工作,具有广阔的市场。
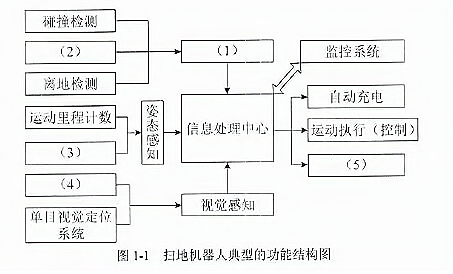
服务型智能扫地机器人需要具有自主运动规划和导航功能,在其工作过程中,需要通过对环境信息的融合感知进行行为决策。扫地机器人一般具备的主要功能包括:
( ) 紧急状态感知:包括碰撞检测、跌落检测和离地检测等功能,防止与障碍物碰撞、前方台阶跌落危险以及扫地机器人离地等,实现扫地机器人运动中的自我保护。
( ) 姿态感知:包括运动里程计数和航向测量等功能,需要获取扫地机器人的运动速度、行走距离、航向角度等信息。
( ) 视觉感知:包括单目视觉避障系统和单目视觉定位系统等,需要通过视觉信息探测障碍物,视觉信息来自两个单目摄像头系统。在某些设计中,也可结合红外测距传感器进行障碍物探测。
( ) 自动充电:在工作过程中,需要实时监控扫地机器人的电量,且在电量少于一 定阈值时自动返回电源处进行充电。
( ) 扫地及吸尘单元:使用电机控制刷子实现清扫,使用抽灰电机实现吸尘。
( ) 运动执行:对机器人的运动进行控制。
( ) 监控系统:通过无线网络传递扫地机器人的状态数据及视频图像等信息到远程客户端,客户端参与到扫地机器人的运动监视及控制中,实现信息交互,监控扫地机器人的实时状态。客户端包括PC客户端和手机客户端两种。
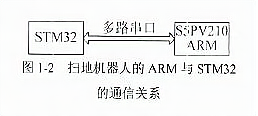
( ) 信息处理中心:用于接收各种传感器信息和视觉信息,通过分析处理进行扫地机器人的运动控制,且负责和后台监控中心通信。 服务型智能扫地机器人选用ARM+STM32双核架构模式,分别处理数据量较大的图像信息和短促型的非图像信息。STM32选用STM32F103VET6芯片,用于实现非图像以外的众多传感器的驱动以及数据采集,并控制车轮电机的运动;ARM选用S5PV210处理器实现摄像头图片的采集、在监控系统中接入无线网络、对STM32串口传过来的传感器数据以及图像定位和避障信息做综合处理,生成运动决策,发送给STM32,执行扫地机的前进、后退、转弯等。
服务型智能扫地机器人需要具有自主运动规划和导航功能,在其工作过程中,需要通过对环境信息的融合感知进行行为决策。扫地机器人一般具备的主要功能包括:
( ) 紧急状态感知:包括碰撞检测、跌落检测和离地检测等功能,防止与障碍物碰撞、前方台阶跌落危险以及扫地机器人离地等,实现扫地机器人运动中的自我保护。
( ) 姿态感知:包括运动里程计数和航向测量等功能,需要获取扫地机器人的运动速度、行走距离、航向角度等信息。
( ) 视觉感知:包括单目视觉避障系统和单目视觉定位系统等,需要通过视觉信息探测障碍物,视觉信息来自两个单目摄像头系统。在某些设计中,也可结合红外测距传感器进行障碍物探测。
( ) 自动充电:在工作过程中,需要实时监控扫地机器人的电量,且在电量少于一 定阈值时自动返回电源处进行充电。
( ) 扫地及吸尘单元:使用电机控制刷子实现清扫,使用抽灰电机实现吸尘。
( ) 运动执行:对机器人的运动进行控制。
( ) 监控系统:通过无线网络传递扫地机器人的状态数据及视频图像等信息到远程客户端,客户端参与到扫地机器人的运动监视及控制中,实现信息交互,监控扫地机器人的实时状态。客户端包括PC客户端和手机客户端两种。
( ) 信息处理中心:用于接收各种传感器信息和视觉信息,通过分析处理进行扫地机器人的运动控制,且负责和后台监控中心通信。 服务型智能扫地机器人选用ARM+STM32双核架构模式,分别处理数据量较大的图像信息和短促型的非图像信息。STM32选用STM32F103VET6芯片,用于实现非图像以外的众多传感器的驱动以及数据采集,并控制车轮电机的运动;ARM选用S5PV210处理器实现摄像头图片的采集、在监控系统中接入无线网络、对STM32串口传过来的传感器数据以及图像定位和避障信息做综合处理,生成运动决策,发送给STM32,执行扫地机的前进、后退、转弯等。
图1-1是本题的服务型智能扫地机器人典型的功能结构图,请根据说明的描述,填写( )-( )空白处,完成该功能结构图。请将( )-( )的内容填在答题纸上相应的位置中。
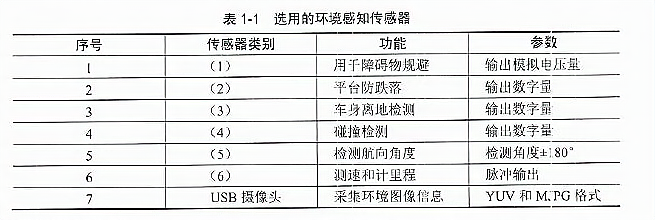
为了实现服务型智能扫地机器人的功能,就需要多种传感器来感知工作环境信息。 王工在对传感器进行选型时,选择了如下类型的传感器:
1. USB摄像头;
2.开关式传感器;
3. 槽型光耦模块;
4.数字式防跌落传感器;
5.红外测距传感器;
6.GGPM01A单轴角度陀螺仪(传感器);
7.霍尔码盘传感器。
请根据传感器的功能完成表1-1,请将( )-( )的内容填在答题纸上相应的位置中。
1. USB摄像头;
2.开关式传感器;
3. 槽型光耦模块;
4.数字式防跌落传感器;
5.红外测距传感器;
6.GGPM01A单轴角度陀螺仪(传感器);
7.霍尔码盘传感器。
请根据传感器的功能完成表1-1,请将( )-( )的内容填在答题纸上相应的位置中。
由于该服务型智能扫地机器人的硬件采用双处理器架构,即ARM+STM32双核架构模式,选用串口方式在处理器之间传递数据, 如图1-2所示。假设在本串行传输中的数据格式为:8位数据位、1位起始位、1位停止位,无校验位。( ) 当波特率为9600b/s时,每秒钟传送的有效数的通信关系数据是多少字节?( )为保证数据收发正确(每个字节数据传输中的累计误差不大于1/4 bit),试分析发送方和接收方时钟允许的误差范围, 并以百分比形式给出最大误差。请将答案填写在答题纸的对应栏中。